Today we are featuring Cesium, a three-time Google Summer of Code participant. Read more below about the fascinating work their students did with imagery this past summer.

Cesium is a JavaScript library for creating 3D globes and 2D maps in a web browser without a plugin. It uses WebGL for hardware-accelerated graphics, and is cross-platform, cross-browser and tuned for dynamic-data visualization. Cesium first participated in Google Summer of Code (GSoC) in 2013. The bright students who have joined us through GSoC have made significant contributions to the Cesium community. This summer, our students worked on the following projects:
Bringing Cesium to NASA imagery, Abhishek improved visualization of LIDAR profile data from NASA’s Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations (CALIPSO). CALIPSO data is used to study atmospheric developments such as cloud formation and aerosol interactions, and can be extended to develop models for climate predictions among other possibilities. Using Cesium, Abhishek developed an interface that takes a user’s location input and displays the profile curtains nearest to that location. The user can select the time range for the data curtains, and the profile curtains near the location of interest will be refreshed accordingly. Perhaps most importantly, the interface shows the CALIPSO profiles in their natural “curtain” orientation in the context of traditional “flat” maps served by NASA’s Global Imagery Browse Services. This allows users to effectively combine the strengths of both types of maps for tasks such as determining the three-dimensional structures of clouds and dust storms. See the live demo and source code.
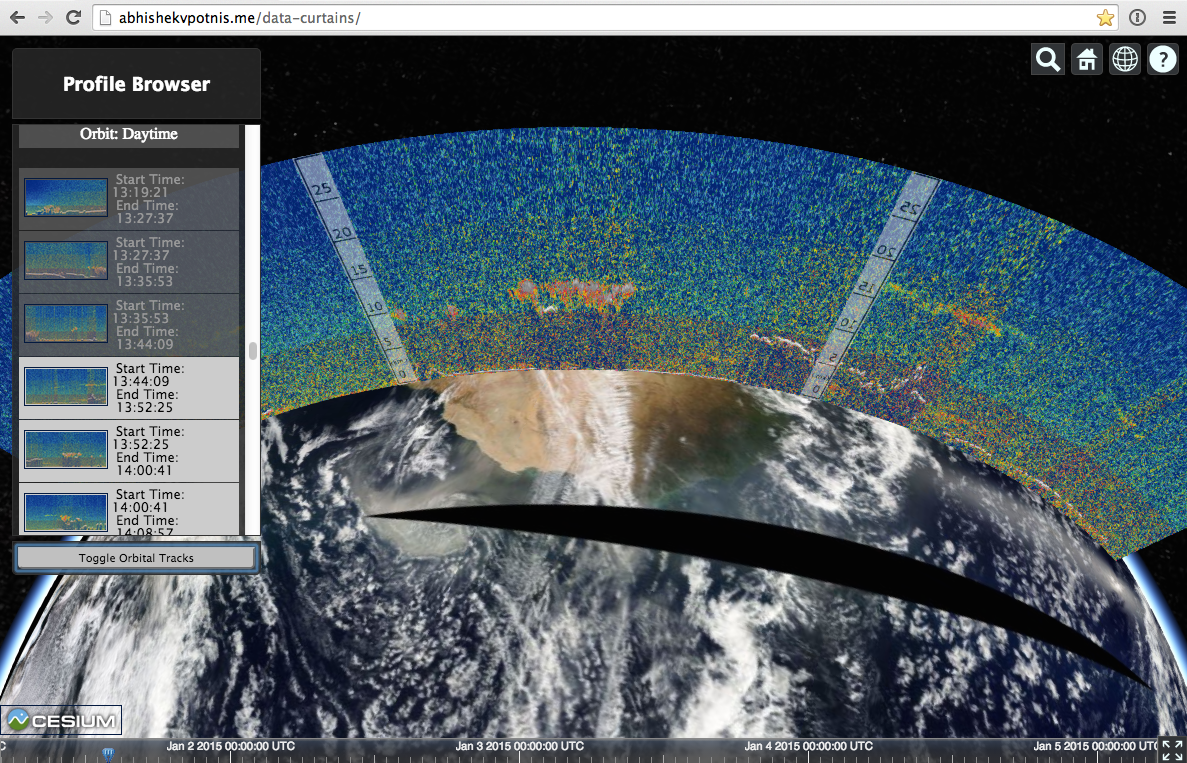 |
| By combining “flat maps” with “data curtains,” a user can visualize the height of clouds and dust storms above the Earth’s surface. In this case, cloud heights above western Africa are shown as red and yellow blobs in the generally blue LIDAR curtain. The CALIPSO satellite recorded the LIDAR curtain at approximately the same time as the Aqua satellite recorded the “flat map” below it. |
André joined us in 2013 as part of GSoC and worked on client-side support for KML, allowing users to easily visualize the many geographic data sets widely available in KML files. This year, he returned to tackle native Cesium support for GPS Exchange Format (GPX). GPX support will let anyone with a cell phone or other GPS device easily transfer their own outdoor activities (such as bike rides, running, boating, and even drone flights) into Cesium. Check out his GitHub pull request for the full technical details. Since he will be graduating from Técnico Lisboa in January, this is André’s final GSoC, but we hope he continues to contribute to Cesium as he embarks on his professional career!
Geography Markup Language (GML) Simple Features Profile (SFP) is a common way of representing geospatial vector features such as points, lines, and polygons, plus accompanying metadata. In addition to being useful in its own right for spatial data visualization, GML SFP is commonly used to encode features retrieved from an OGC standard Web Feature Service (WFS) and to represent the result of a GetFeatureInfo call to a Web Map Service (WMS). This summer Ayush implemented support in Cesium for GML SFP.
By Sarah Chow, Cesium Organization Administrator